Aina joskus huomaa kehityksen menevän eteenpäin. Tänä keväänä sen huomasi paikkatietoteknologiasta. Olen käyttänyt traktorissa ajo-opastinta noin 15 vuotta. Kyseessä on siis laite, jonka avulla saa ajettua pellolle vieriviereen samansuuntaisia vetoja. Helpottaa työtä ja vähentää päällekkäinajoa. Nyt kuitenkin ajo-opastin alkoi olla kehityskulkunsa päässä: taivaalla oli 40 satelliittia, joista ajo-opastin näki 5. Oli aika katsoa, mitä markkinoilla oli tarjolla vuonna 2025.
Ensimmäinen iloinen yllätys oli avoimen teknologian kehittäjäaktiivien määrä. Pienellä penkomisella löytyi Zed F9P alustat ja näistä espanjalaisen start-upin kasaamat Ardusimple -paketit. Näissä hyödynnetään RTK-teknologiaa, joka aukeaa ehkä parhaiten alla olevasta Wikipedia-kuvasta. Satelliiteista tuleva data menee traktoripaikantimen (Rover) lisäksi tukiasemalle, joka on paikoillaan. Poikkeamat paikasta ovat silloin paikannusvirheitä, jotka voidaan korjata ja päästä parempaan tarkkuuteen. Tyypillisesti korjaamattomalla signaalilla päästään 200-500 cm paikannustarkkuuteen ja korjatulla sitten 1-2 cm tarkkuuteen. Ja tämä sitten mahdollistaakin yhtä ja toista maataloudessa.
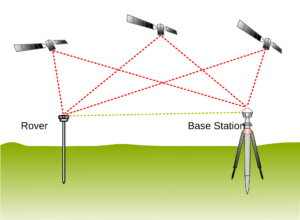
Kuva 1. RTK paikannuksen periaate: Paikallaan pysyvän aseman (base) sijaintitiedon avulla korjataan liikkuvan aseman (rover) sijaintitietoa.
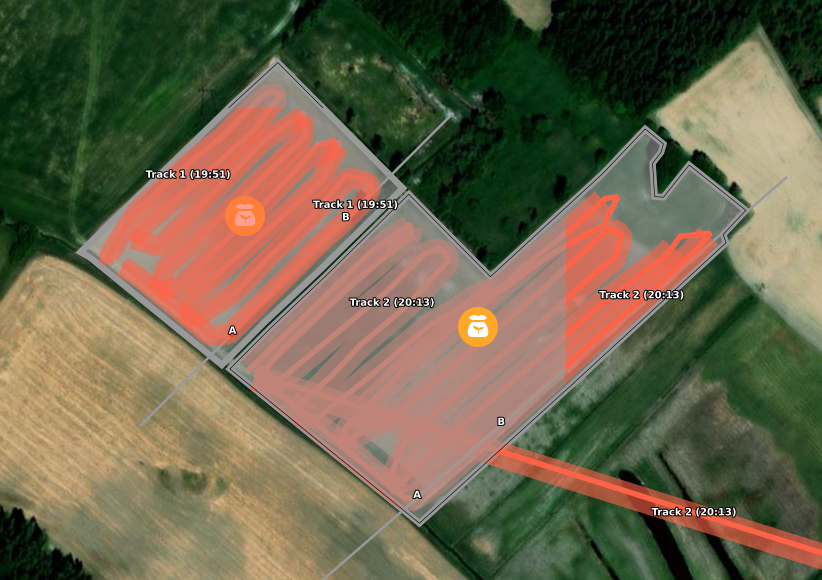
Ajo-opastusta käytetään yleensä pellolla vierekkäisten linjojen ajoon. Tässä tämä toimi oivallisesti, mitä nyt pari häiriötilannetta johti hetkelliseen pelloltakatoamiseen. Muutoin mittaustarkkuus oli sentin luokkaa ja häiriöt tulivat siitä, kun isäntä yritti tottua uuteen Fieldbee -sovellukseen (Kuva 2).

Kuva 2. Ajo-opastin peruskäytössään, vieri-viereen ajon mahdollistajana. Kuvassa näkyy myös harmillinen ilmiö, jossa sijainti hyppää, kun yhteys tukiasemaan katkeaa.
Sentin mittaustarkkuus antaa myös jänniä mahdollisuuksia, sillä paikannus on tarkka myös korkeussuunnassa. Tein kokeilun, jossa ajoin pellon ympäri Locus GIS sovelluksella dataa keräten ja piirsin tästä korkeuskaavion (Kuva 3). Peltolohkolla olisi tarvetta perata reunaojat ja nopean korkeuskartoituksen perusteella edessä on hieman pohtimista. Lohkon lounaislaidassa oleva valtaojan vieri on nimittäin 0,4 m korkeammalla kuin märkä, kuivatusta kaipaava kohta. Joko reunaoja pitää kaivaa kokoajan syveneväksi (jolloin se on loppupäästään 6 m leveä), tai sitten edessä on kaivo & putki tyyppinen ratkaisu.

Kuva 3. Pellon ympäriajo paljasti, miksi osa pellosta ei meinaa kuivua reunaojien avulla.
Aikoinaan ajo-opastin maksoi noin 2000 €, nyt komponenteista kasattu sarja maksoi 270 €. Homman sai käyttöön noin vartissa, kiinnostuneille työvaiheet olivat seuraavat:
- osta Ardusimplen ”RTK Portable Bluetooth kit”, (Suosittelen lisäksi USB OTG piuhaa ulkoisella virranjaolla ja pohjalevyä antennille ”Ground plate”, jos traktorin katto ei ole metallia)
- laita antenni katolle, ruuvaa sen johto Zed -laatikkoon, kytke siihen virta esim. tupakansytyttimen USB portista. (Jos ostit OTG jakajan, saat ladattua puhelinta ja kytkettyä puhelimen häiriöttä laatikkoon)
- ota käyttöön älypuhelimen kehittäjä-tila, ja sitä kautta mock-sijainti
- etsi USB antenni Bluetooth -laitteista (pin koodi 1234)
- GNSS Master sovelluksessa seuraavat temput
- yhdistä Bluetooth antenniin
- korjaussignaali esimerkiksi lähimpään rtk2go.com tai caster.centipede.fr tukiasemaan, näitä kannattaa varmuudeksi laittaa molemmat ja pari eri, siltä varalta että yksi asema takkuaa pellolla ollessa
- mock-sijainti päälle
- u-blox päivitystaajuus 5 Hz
- käytä joko Fieldbee– sovellusta tai FieldNavigatoria navigointiin (aseta niissä päivitystaajuus joko 5 Hz tai 1 Hz)
- datan keruuseen SW Maps tai Locus GIS sovellukset toimivat oivallisesti
Yhteenvetona, paikkatietoteknologiassa on menty vapaaehtois- ja harrastajavoimin nyt siihen pisteeseen, että muutamalla satasella saa liikkuvan paikantimen sijainnin selville parin sentin tarkkuudella. Tämä laittaa maatalouden seurannan ja esimerkiksi peltojen vesitalouden suunnittelun eri tasolle.